






Placas para Arduino
Motor de passo 5V + drive ULN2003 (stepper Motor) para Arduino
SKU: K002
Disponibilidade:
Fora de estoque
R$14,90
Fora de estoque
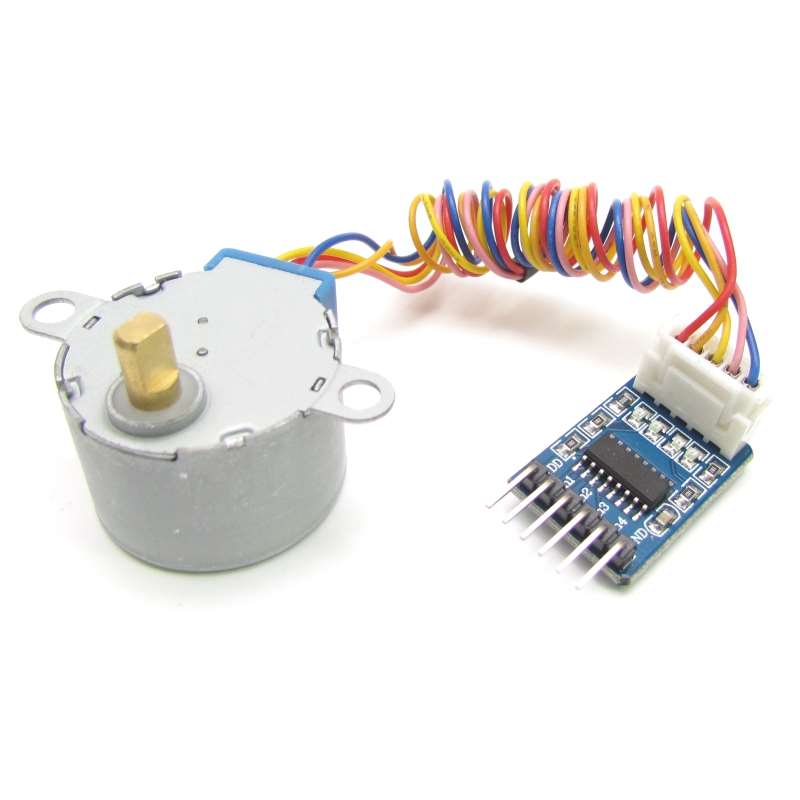
Motor de Passo 5V Drive ULN2003 com 5 vias de alimentação e 4 fases. Acompanha o Driver de controle ULN2003. Ideal para aplicações com microcontroladores PIC, Arduino, Atmel, AVR. A placa do driver possui 4 LED´s para indicar as bobinas (fases) acionadas e 4 pinos, um para o acionamento de cada bobina (fases).
A frequência nominal é 100Hz, ele pode trabalhar ate 250Hz e a frequência de over é 400Hz, em 250Hz ele tem 17,5 RPM ,em 100Hz ele de 7 RPM.
Motor de Passo 5V Drive ULN2003
Muito fácil de ser utilizada. Em caso de dúvidas basta perguntar.
Características
- Modelo: 28YBT-48
- Controlador: ULN2003
- Relação de redução: 1/64
- Ângulo dos passos: 5.625º x 1/64
- Alimentação: 5v
- Fases: 4
- Vias: 5
- Ângulo do Passo: 5,625/64 ? 0,088°
- Redução: 1/64
- Resistência: 60 ohms/fase
- Torque Máx: 2,2 Kgf.cm
- Diâmetro do motor: 28mm
- Peso: 40g
- Dimensões da placa: 27mm x 18mm x 10,8mm
- Sequência das fases: 1 : Azul, 2: Rosa, 3: Amarelo e 4: Laranjado
- Motor: 5 fios, 4 fases (O terminal central das bobinas são interligados formando o 5º fio, o vermelho)
- Pode trabalhar até 250Hz
- Frequência de over: 400Hz
- RPM em 250Hz: 17,5 RPM
- RPM 100Hz: 7 RPM
Example Code
// This Arduino example demonstrates bidirectional operation of a
// 28BYJ-48, using a ULN2003 interface board to drive the stepper.
// The 28BYJ-48 motor is a 4-phase, 8-beat motor, geared down by
// a factor of 68. One bipolar winding is on motor pins 1 & 3 and
// the other on motor pins 2 & 4. The step angle is 5.625/64 and the
// operating Frequency is 100pps. Current draw is 92mA.
////////////////////////////////////////////////
//declare variables for the motor pins
int motorPin1 = 8; // Blue – 28BYJ48 pin 1
int motorPin2 = 9; // Pink – 28BYJ48 pin 2
int motorPin3 = 10; // Yellow – 28BYJ48 pin 3
int motorPin4 = 11; // Orange – 28BYJ48 pin 4
// Red – 28BYJ48 pin 5 (VCC)
int motorSpeed = 1200; //variable to set stepper speed
int count = 0; // count of steps made
int countsperrev = 512; // number of steps per full revolution
int lookup[8] = {B01000, B01100, B00100, B00110, B00010, B00011, B00001, B01001};
//////////////////////////////////////////////////////////////////////////////
void setup() {
//declare the motor pins as outputs
pinMode(motorPin1, OUTPUT);
pinMode(motorPin2, OUTPUT);
pinMode(motorPin3, OUTPUT);
pinMode(motorPin4, OUTPUT);
Serial.begin(9600);
}
//////////////////////////////////////////////////////////////////////////////
void loop(){
if(count < countsperrev )
clockwise();
else if (count == countsperrev * 2)
count = 0;
else
anticlockwise();
count++;
}
//////////////////////////////////////////////////////////////////////////////
//set pins to ULN2003 high in sequence from 1 to 4
//delay “motorSpeed” between each pin setting (to determine speed)
void anticlockwise()
{
for(int i = 0; i < 8; i++)
{
setOutput(i);
delayMicroseconds(motorSpeed);
}
}
void clockwise()
{
for(int i = 7; i >= 0; i–)
{
setOutput(i);
delayMicroseconds(motorSpeed);
}
}
void setOutput(int out)
{
digitalWrite(motorPin1, bitRead(lookup[out], 0));
digitalWrite(motorPin2, bitRead(lookup[out], 1));
digitalWrite(motorPin3, bitRead(lookup[out], 2));
digitalWrite(motorPin4, bitRead(lookup[out], 3));
}
Acompanha
- 1 x Motor de passo 4 fases 5V
- 1 x Placa driver com CI ULN2003
O que é Arduino?
Arduino, é uma plataforma de prototipagem eletrônica de hardware livre e de placa única, projetada com um microcontrolador Atmel AVR com suporte de entrada/saída embutido, uma linguagem de programação padrão, a qual tem origem em Wiring, e é essencialmente C/C++. O objetivo do projeto é criar ferramentas que são acessíveis, com baixo custo, flexíveis e fáceis de se usar por artistas e amadores. Principalmente para aqueles que não teriam alcance aos controladores mais sofisticados e de ferramentas mais complicadas.
| Peso | 0,1 kg |
|---|---|
| Dimensões | 15 × 11 × 7 cm |


